蔬菜作物类型繁多,栽培茬口多样,种植方式与技术复杂多变,存在塑料地膜、大棚、防鸟网、防虫网等复杂背景覆盖情形,这影响着蔬菜作物的光谱特征,基于无人机高光谱的蔬菜作物的精细分类仍然面临着一些挑战。为解决上述现实问题,湖南师范大学的研究人员采用无人机高光谱数据,探索基地内不同蔬菜作物精细分类方法,以期为开展复杂背景下的基于无人机高光谱遥感技术的蔬菜作物精细分类方法研究和蔬菜种植精细管理提供技术支撑。
本次研究区域位于该试验基地南部区域,包含有番茄、辣椒、水稻等9种农作物,试验时间正值该区域不同蔬菜作物培育、生长关键期,实验区蔬菜作物类型较多,不同蔬菜作物的覆盖背景十分复杂,包括地膜、防鸟网、防虫网以及大棚覆盖等,如图1 所示,比较适合复杂背景下作物分类研究。
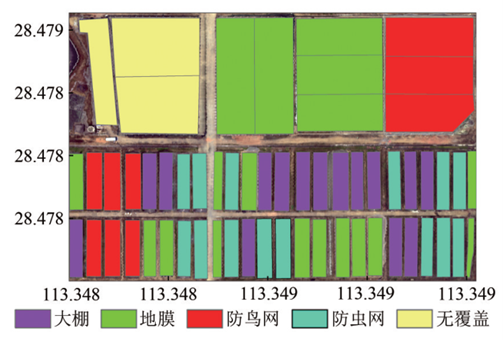
图1 研究区覆盖类型分布图
1.数据采集
无人机上搭载了美国Headwall公司全反射高光谱成像仪Nano-Hyperspec,其光谱范围是400—1000 nm,270个光谱波段。作业时飞行高度为200 m,地面分辨率为12.33 cm。飞行前,在飞行区域平整地面上铺设定标白布,用于获取地表反射率数据。由于图像空间分辨率较高、范围较大,将原始图像以4∶1的方式进行空间采样,同时训练样本与测试样本执行同样的操作。
根据实地踏勘结果,通过人工选取小块作物作为带标记的训练样本,再选择剩下的作物作为测试样本,以此减少训练集与测试集的空间相关性,同时增加样本测试的难度,具体分布见图2。
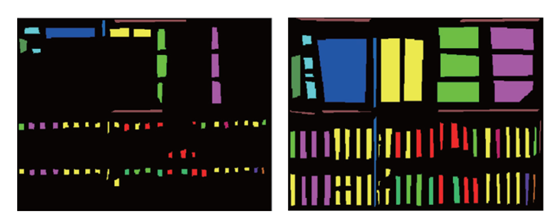
(a)训练样本 (b) 测试样本

(c)不同颜色代表的地物类型
图2 不同地物的训练样本与测试样本分布
2.分类方法
在机器学习领域中,SVM方法利用结构风险,最小化原理,能够在少量样本情况下完成多维特征分类,取得良好分类效果并可以避免过拟合现象,SVM优良的泛化能力使得其被广泛应用于遥感图像分类领域。本研究设计了传统SVM 分类方法(SVMLinear)、基于核变换的SVM 分类方法(SVMRBF)、基于主成分变换和核变换的SVM分类方法(SVM-RBF-PCA) 对实验田的不同作物分类。深度卷积神经网络结构可以自动学习图像的抽象特征,获得样本更高层次和更丰富的语义信息,从而更好地完成分类任务,避免了传统方法中使用特征工程选择和构建特征集的繁琐流程。本文也采用一维CNN卷积神经网络(1D-CNN)、三维卷积神经网络(3D-CNN)以及引入注意力机制的Attention-CNN模型作为对比。
3.结果分析
当地物受到土壤、地膜、大棚覆盖背景物体等强烈影响时,地物诊断光谱特征会发生变化。图3 (a)、(b)、(c) 分别显示了在大棚、地膜和防虫网覆盖背景下,不同作物平均光谱与标准差。可以看出,作物在不同覆盖背景下,同类作物的光谱变化范围较大,不同作物之间会存在交叠区域,这意味着仅采用光谱特征对作物精细分类存在较大挑战。另外,研究区14类不同地物训练样本的平均光谱相关系数矩阵如图3 (d) 所示,此相关系数矩阵图也表明,铁皮厂房与其他地物光谱呈负相关特征,受地面背景影响,水泥路面和无种植区与其他作物的光谱相似程度有较大差异;而从整体上来看,不同蔬菜作物之间的光谱相似程度较高,这也表明仅利用光谱特征较难区分这些不同蔬菜作物。
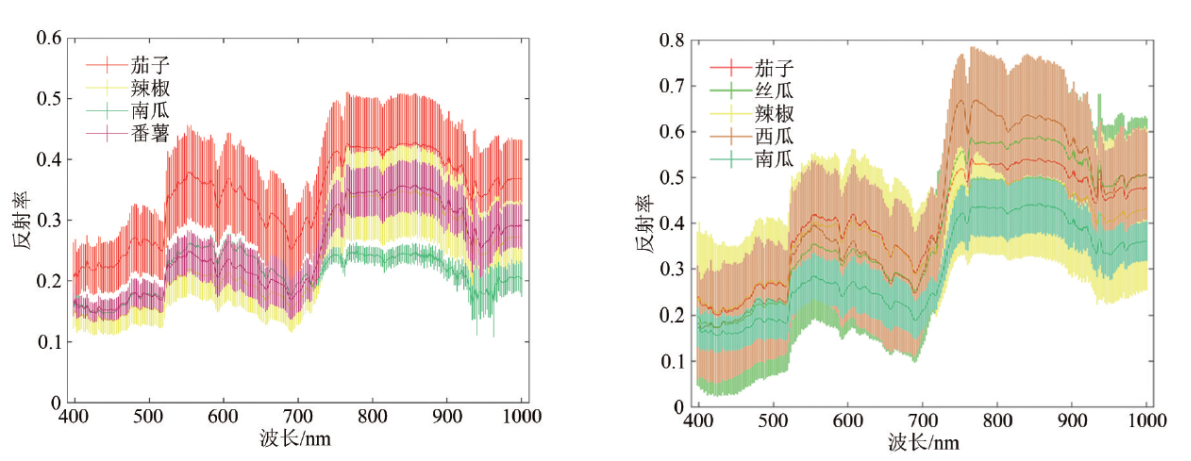
(a)大棚覆盖背景作物平均光谱与标准差 (b) 地膜覆盖背景作物平均光谱与标准差
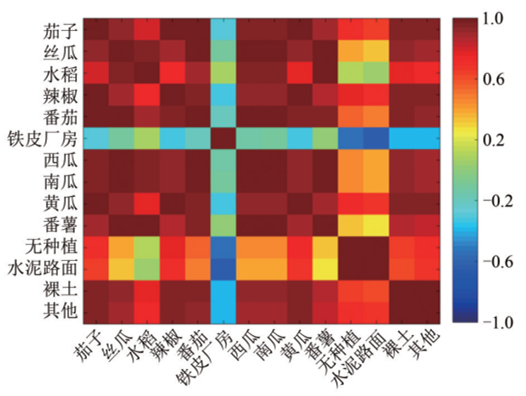
(c) 防虫网覆盖背景作物平均光谱与标准差 (d) 训练样本平均光谱相关系数矩阵
图3 不同作物平均光谱的异同与相关系数
实验所用训练集、测试集及不同分类方法得到的结果如图4所示,精度评价见表1。
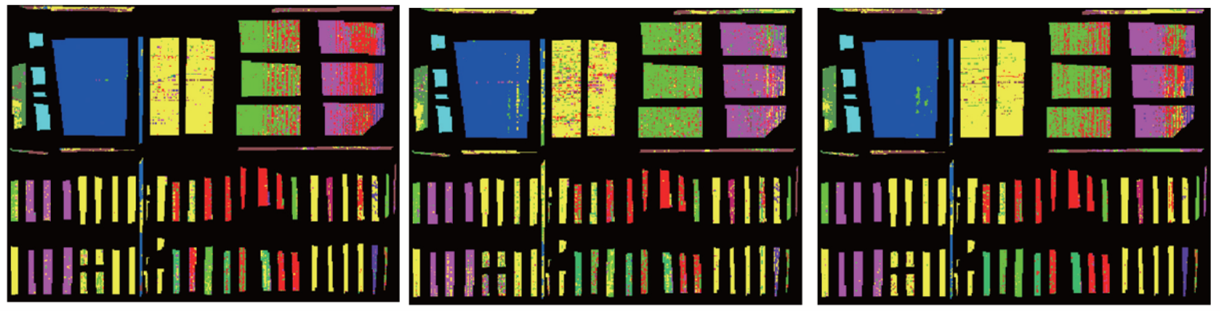
(a) SVM-Linear (b) SVM-RBF (c) SVM-RBF-PCA

(d) SVM-RBF-PCA-GLCM (e) SVM-ERW (f) 1D-CNN
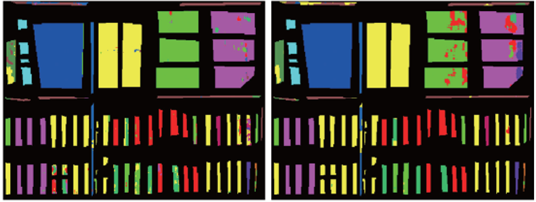
(g) 3D-CNN (h) Attention-CNN
![]()
图4 基于不同方法的作物分类结果
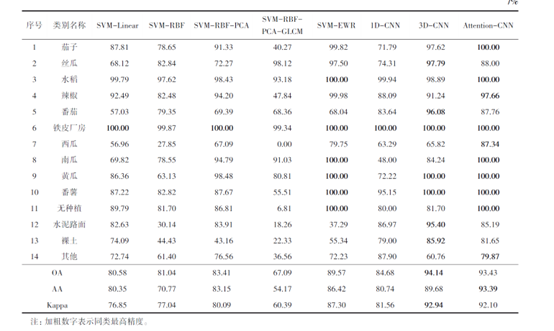
表1 测试样本的分类精度
从分类精度评价结果来看,基于SVM方法的总体分类精度、用户平均精度和Kappa系数均要低于深度学习方法得到的结果。而当训练样本数量较少时,基于SVM方法难以挖掘总体特征,分类模型的泛化能力不足,从而导致分类结果不稳定,在有些模型中分类精度偏低,比如西瓜、黄瓜、番薯、水泥路面等地物。然而,基于深度学习的分类方法能够容纳更多的特征信息,学习到更多抽象特征,对噪声及模型的容错能力也更强,所以在3D-CNN模型和Attention-CNN模型中,所有类别的分类精度均比较稳定且都较高。
另外,受背景因素影响小且属于大面积密集分布的地物在所有分类方法中均能有效地区分开来,比如铁皮厂房、水稻,这从训练样本的平均光谱特征也能反映出来。而不同蔬菜种类的混合光谱较为严重,且种植面积小、植株间隔与生长发育阶段差异大,从而导致难以区分,这在不同的分类方法体现较为明显,比如番茄、番薯、黄瓜和辣椒等,在3DCNN和Attention-CNN 模型中得到了极好的区分,而其他分类方法的结果差异较大。
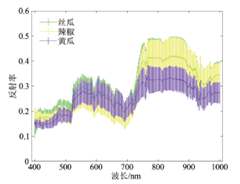
不同尺度地块上的蔬菜作物精细分类主要依赖于蔬菜作物本征光谱特征和空间纹理结构特征。大尺度地块上的蔬菜作物空间纹理结构更加显著,如辣椒、番茄和丝瓜,而小尺度地块上蔬菜作物因种植数量有限,无法形成大规模空间覆盖,空间纹理结构特征不能很好地体现作物空间分布特征不同覆盖背景会与作物产生光谱混合现象,特别是作物处于不同生长发育阶段、叶面积覆盖较小时,作物混合光谱效应越明显,混合光谱差异越大,从而影响作物的精细分类结果。水稻作物由于没有覆盖背景影响且叶面积覆盖较大,其光谱特征明显、作物内部同质性高,因此在所有分类方法中水稻作物能够很好地与蔬菜其他作物区分开来。辣椒包含地膜、大棚和防虫网3种覆盖背景,尽管总体上深度学习方法获得了较好的分类结果,但是在不同覆盖背景上的分类效果还是存在一定的差异。从图5中可以看出,不同覆盖背景下的作物光谱有显著差异,这也给同种作物精细分类带来较大挑战。
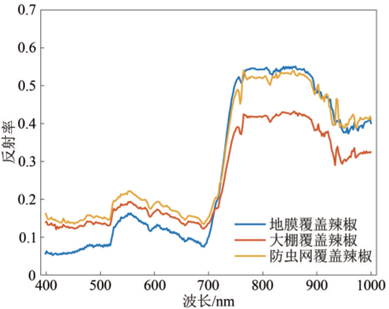
(a)辣椒
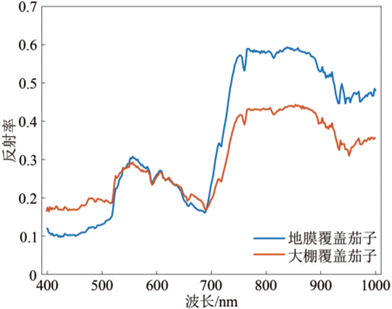
(b)茄子
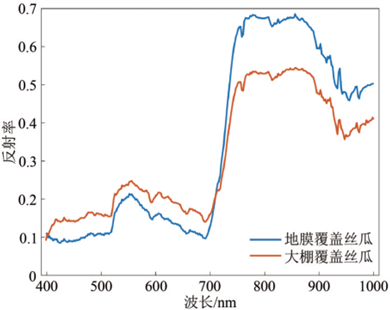
(c)丝瓜
图 5不同覆盖背景下蔬菜作物光谱

NanoHP超微型机载高光谱成像光谱仪,凸面全息光栅全反射光路。光谱波段范围400-1000nm,1020个空间通道,342个光谱通道,内置APX15高精度惯导,可适配各型无人机。可选配LiDAR,后期数据处理可以将高光谱与点云数据融合。
原文链接: https://www.ygxb.ac.cn/thesisDetails?columnId=25632567&lang=zh