引言:
本研究利用无人机获取多田块冠层尺度的不同倒伏率小麦多光谱数据, 提取小麦倒伏DSM模型和植被指数分别与多光谱图像进行融合, 筛选差异性较大的纹理特征, 采用3种典型的监督分类模型对融合图像、 多光谱图像和纹理特征图像进行监督分类, 并对分类结果进行对比分析, 以期寻求各倒伏率麦田识别倒伏最佳的特征组合和监督方法。
1、实验部分
1.1 数据采集
本试验采用大疆Matrice 600 Pro无人机搭载美国Micasense公司的RedEdge-MX多光谱成像系统进行数据采集。
RedEdge-MX传感器共有蓝、绿、红、红边、近红外5个通道,对应中心波长/波宽分别是475/32、 560/27、668/16、717/12和840/57nm,各通道分辨率均为1280×960,视场范围47.2°,并配有校正反射率的校准板[图1(c)]和校正太阳与光线角度的光强传感器。
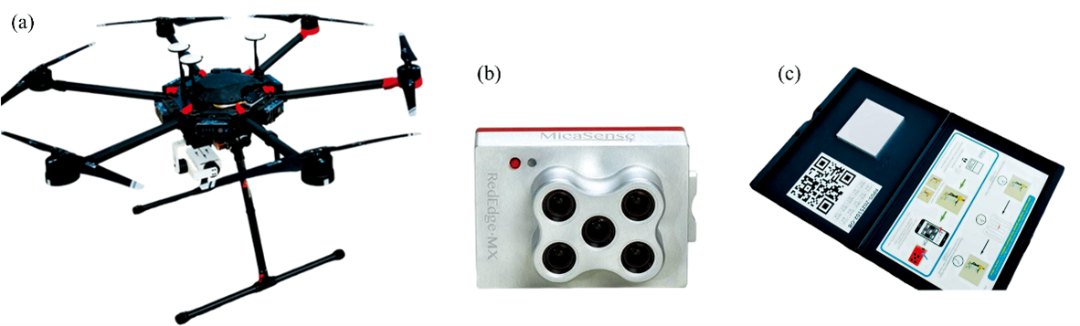
图1 无人机多光谱遥感平台
1.2 研究方法
首先对航拍获取的原始图像进行预处理,包括图像拼接、辐射校正和几何校正等,然后剔除麦田背景,包括土壤背景和阴影背景,对比倒伏与正常小麦的光谱反射率差异,筛选合适的植被指数,合成小麦倒伏DSM模型,分别与多光谱图像进行特征融合,合成DSM与多光谱融合图像和植被指数与多光谱融合图像,并提取小麦图像纹理特征,合成倒伏纹理特征图像,构建小麦正常与倒伏数据集并划分训练集与验证集;再通过不同监督分类方法提取不同倒伏率麦田的倒伏面积,最后利用总体精度(overall accuracy, OA)、Kappa系数和提取误差分析各特征组合对不同倒伏率研究区域倒伏面积提取精度的影响,优选最佳的分类方法。技术路线如图2所示。
1.3 数据预处理与特征提取
1.3.1 数据预处理
拼图与图像融合完成后,利用重归一化差值植被指数 (Re-normalized difference vegetation index, RDVI)分割小麦与土壤背景, 并利用阴影指数(shaded vegetation index, SVI)分割小麦与阴影背景, 利用数据统计工具比对生成二值化矢量掩膜, 导入感兴趣区域进行图像裁剪, 以减少土壤和阴影背景对分类结果的影响。
1.3.2 样本划分
DSM图像能较好地反映地面的起伏变化, 满足区分正常与倒伏小麦的要求, 倒伏与正常样本分离度均高于1.8。
1.3.3 光谱分析与波段选择
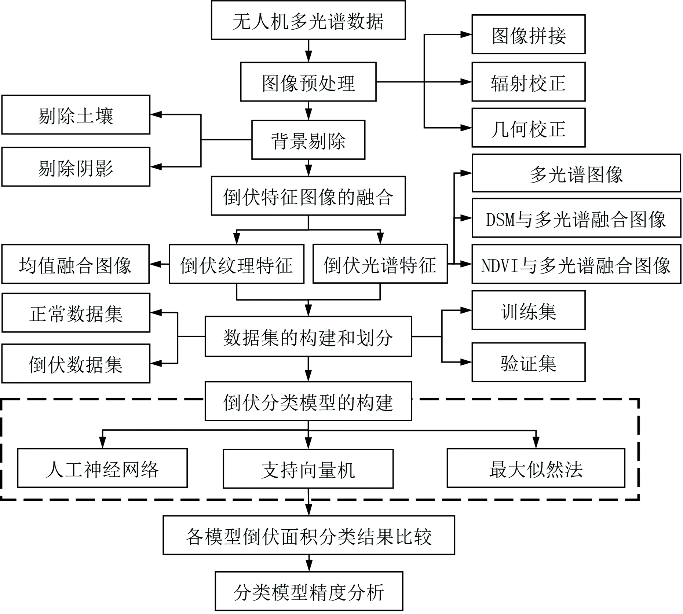
首先需对掩膜裁剪后的图像进行卷积低通滤波处理, 以减少图像噪声对分类精度的影响[3], 以增强正常与倒伏小麦图像之间的差异。当太阳直射时, 小麦叶片会表现为光照和荫蔽, 光照面为阳叶, 荫蔽面为阴叶, 在单叶片尺度, 阳叶反射率要高于阴叶1~5倍。由图3可知, 小麦发生倒伏后, 各波段反射率明显上升, 原因可能是小麦倒伏后, 原本立体的冠层结构空间塌倒, 阳叶比例上升, 阴叶比例下降, 导致各波段反射率上升[11]。倒伏与健康小麦在蓝(475 nm)波段反射率基本一致, 绿(560 nm)红波段(668 nm)开始出现差异, 在红边(717 nm)和近红外波段(840 nm)差异最大, 倒伏小麦反射率高于正常小麦反射率约0.7~1.0, 所以选择差异性较大红、 红边、 近红外波段作为选择植被指数的依据。
图3 光谱反射率曲线
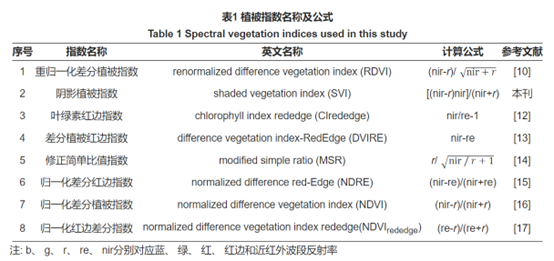
1.3.4 植被指数提取与选择
本研究选择与红、 红边、 近红外波段相关的光谱植被指数如表1所示, 对滤波处理后的图像进行波段运算, RDVI与SVI已参与剔除背景的阈值分割, 参与运算可能会影响提取结果, 故不参与后续建模。
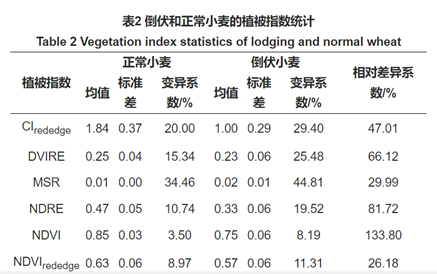
统计研究区域内各植被指数倒伏和正常小麦的均值和标准差, 并通过计算变异系数(coefficient of variation, CV)与相对变异系数(relative difference, RD)挑选最佳的植被指数用于特征图像融合, 计算结果见表2。
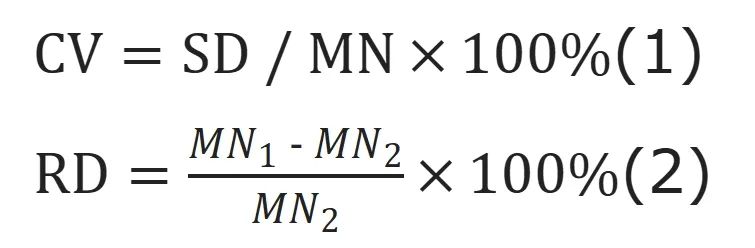
式(1)和式(2)中,CV表示变异系数(%),其中SD为标准差,MN为均值;RD表示相对差异系数(%),MN1和MN2分别为倒伏小麦和正常小麦的均值。
表2中,变异系数表示同一特征内离散程度,变异系数越小越容易区分,而相对差异系数表示多特征间的差异,相对差异系数越大特征区分越明显。基于以上原则,本研究选取NDVI作为图像融合的特征指数。
1.3.5 纹理特征提取与选择
基于灰度共生矩阵,分别计算5个波段的均值、方差、协同性、对比度、相异性、信息熵、二阶矩、相关性等8类,共计40项纹理特征,纹理滤波窗口设置为15× 15,方向0°,步长为2。统计对比小麦倒伏和正常纹理特征差异,发现均值纹理特征差异性明显。为避免过多纹理特征造成信息冗余,本研究仅统计均值纹理特征,并根据统计结果筛选差异性较大的均值纹理特征进行图像融合。计算并统计各波段研究区域内正常与倒伏小麦均值纹理特征,统计结果制成箱线图如图4所示。
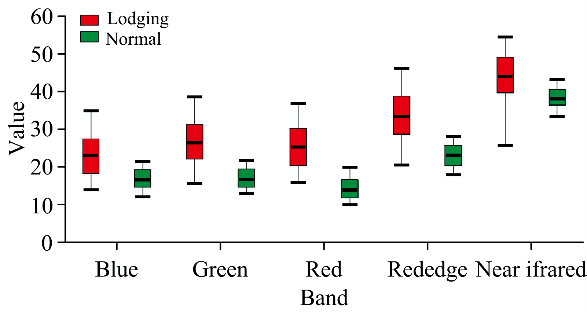
图4 正常和倒伏小麦的均值纹理
由图4可知,小麦发生倒伏后,各波段的均值纹理特征数值均有上升,其中绿(Green)、红(Red)、红边(Rededge)波段上升最明显,倒伏与正常小麦的特征差异较大,但所有波段倒伏与正常小麦特征在数值范围内均存在相交,监督分类时会存在像元错分的现象。为尽量降低错分像元对分类精度的影响,本研究选取绿、红、红边均值纹理特征进行图像融合。
1.3.6 监督分类模型的选择与精度验证指标
选取监督分类模型中泛化能力好的支持向量机(support vector machine,SVM)、适应性强的人工神经网络(artificial neural network,ANN)和算法简单易于实施的最大似然法(maximum like-hood classification,MLC)模型分别对各田块的训练集进行训练,采用总体精度(overall accuracy,OA)、Kappa系数和提取误差综合评价各监督模型的分类性能。
OA和Kappa系数能反映各模型的提取倒伏空间位置的准确性,提取误差能反映真实倒伏面积与提取倒伏面积的相对误差的大小。在提取的特征组合的基础上,利用3种典型的监督模型提取不同倒伏率研究区域小麦倒伏面积。最后通过OA、Kappa系数和提取误差对各监督模型分类精度进行对比,并对分类结果进行综合评价。
2、融合图像的构建
小麦倒伏多光谱数据经背景剔除、低通滤波处理后,利用图像校准工具对各田块进行几何校正,选取各田块DSM图像、NDVI图像分别与多光谱进行主成分变化(principal component analysis, PCA)图像融合, 结合绿、 红、 红边波段均值纹理特征图像生成图5(a— d), 探究不同特征组合提取小麦倒伏面积的效果。
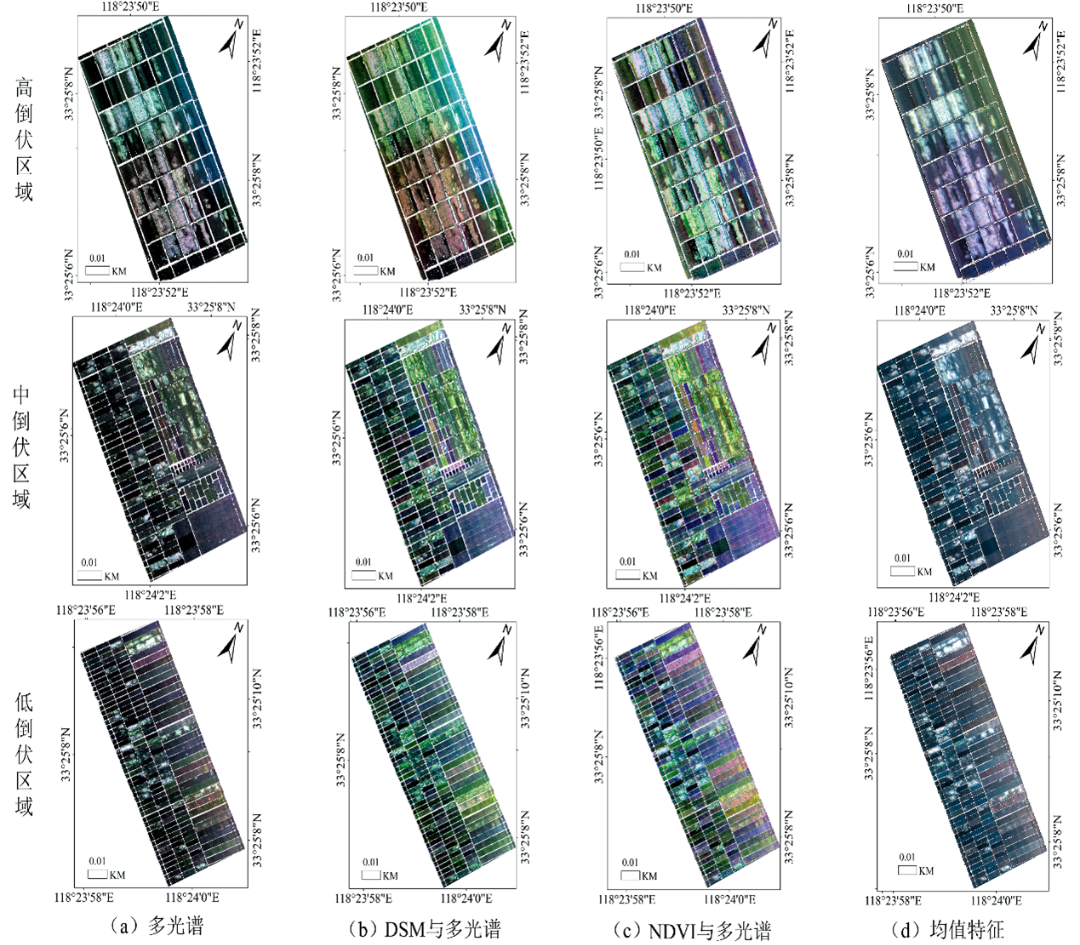
图5 剔除背景后各特征融合图像对比
3、结论
利用小麦灌浆期的无人机多光谱遥感图像,分析适用于小麦倒伏特征融合的最佳光谱特征、植被指数、纹理特征以及DSM图像,并分别与多光谱图像进行融合,得到各研究区域特征融合图像,再利用SVM、ANN和MLC进行监督分类, 通过分析监督分类结果的OA、Kappa系数和提取误差得到以下结论:
(1)无人机多光谱遥感结合特征融合技术能有效提取小麦倒伏面积, 提取效果优于单特征小麦倒伏图像。
(2)当小麦倒伏率较高时(35.89%),多光谱与NDVI融合图像(OA:92.63%,Kappa系数:0.85,提取误差: 1.11%)和均值纹理特征图像(OA: 96.43%, Kappa系数: 0.93,提取误差:8.90%)的SVM监督模型均有较好的提取效果;当小麦倒伏率中等时(17.07%),多光谱与DSM融合图像的SVM监督模型(OA:90.35%,Kappa系数: 0.79, 提取误差:9.34%)提取效果最好;当小麦倒伏率较低时(11.25%),仅均值纹理特征图像的ANN监督模型(OA: 91.05%,Kappa系数:0.82,提取误差:8.20%)提取结果较好。
(3)当小麦发生中心倒伏或向两侧倒伏时, 会裸露倒伏中心土壤,但本研究在进行监督分类前已将土壤背景剔除, 经目视解译分析统计发现, 中心倒伏土壤约占倒伏面积的3%~5%, 保险理赔公司或政府相关部门在进行倒伏面积估算时, 若算入倒伏中心土壤, 则本研究的各监督分类模型倒伏提取面积相应的增加3%~5%会更加准确。
原文链接:https://www.gpxygpfx.com/article/2024/1000-0593-44-1-197.html