摘要:
本研究以巴西伊比里泰水库为研究区,对比大疆公司的精灵 4 多光谱传感器与MicaSense公司的 RedEdge P dual在叶绿素 a 和浊度浓度反演中的性能。其中RedEdge P dual多光谱传感器反演效果最优(决定系数R2=0.867,均方根误差 RMSE=6.72μg/L);浊度反演结果的变异性更大,采用MicaSense数据时,线性回归模型的反演效果优于复杂模型(R2=0.712)。大疆传感器的反演效果始终较差,主要原因是其光谱分辨率有限。
1. 引言
叶绿素 a 和浊度是水质监测的重要参数,分别作为初级生产力和悬浮物浓度的表征指标。叶绿素 a 是浮游植物中的光合色素,是衡量水体营养状态和富营养化水平的关键指标;浊度则用于衡量悬浮颗粒物对光的衰减程度,这些颗粒物包括沉积物、碎屑、浮游生物和有机物等。
本研究以热带富营养化水库为研究区,系统对比大疆精灵 4 多光谱传感器与MicaSense RedEdge-P Dual在叶绿素 a 和浊度反演中的性能。基于 4 次无人机航测数据及对应的原位监测数据,训练并验证 6 种回归模型,涵盖线性回归、指数回归等统计模型,以及决策树、随机森林、支持向量回归、极端梯度提升等机器学习模型。研究旨在分析传感器配置和模型选择对预测精度的影响,为无人机遥感技术在内陆水质评价中的应用提供实践指导。
2. 研究区域与数据获取
本研究以巴西米纳斯吉拉斯州贝洛奥里藏特大都市区的伊比里泰水库为研究区,2024 年,在水库由干季向湿季过渡的时期开展 4 次野外航测试验。为最大限度降低太阳耀斑对数据采集的影响,所有无人机飞行均安排在清晨(8:00-10:30),此时太阳高度角在 25°-45° 之间。每次试验均确保无人机影像与原位监测数据的空间匹配,无人机沿预编程航点飞行计划,覆盖地理参考采样点,随后在 1 小时内,通过船只在相同坐标处采集水质数据。
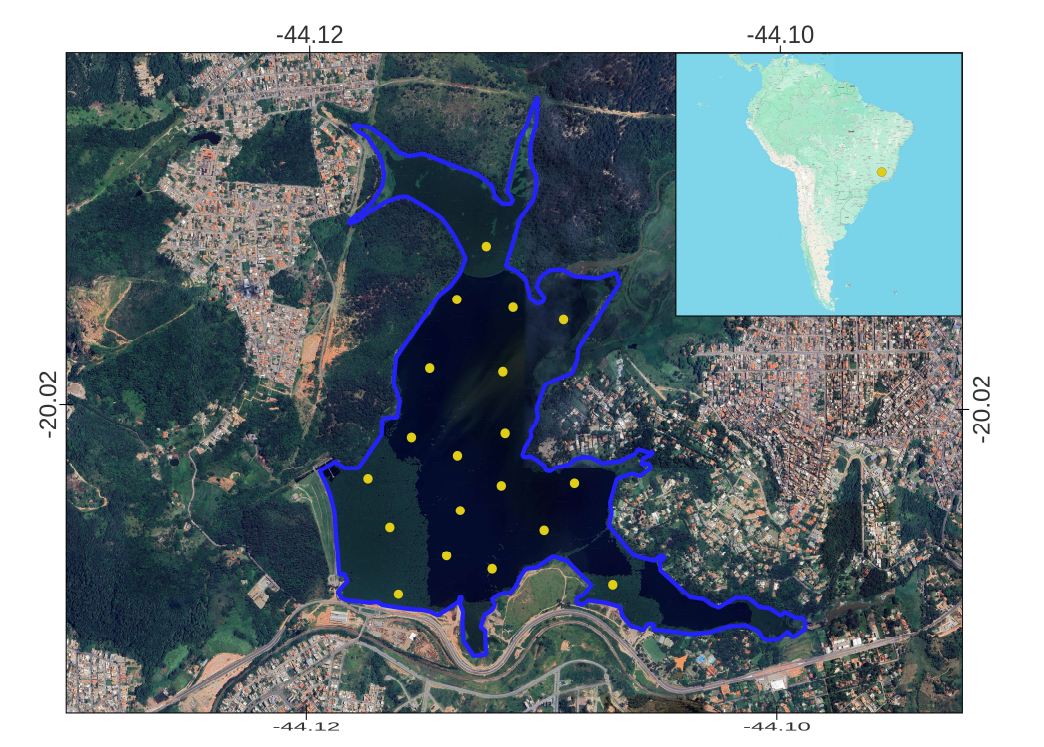
图1 研究区域与采样位置
研究采用两款无人机多光谱成像平台:大疆精灵 4 多光谱无人机为集成式无人机,光谱波段分别为 450、560、650、730 和 840nm,同时配备 RGB 相机;MicaSense RedEdge-P Dual为双传感器配置,涵盖 10 个光谱波段及全色通道,中心波长分别为 444、475、531、560、650、668、705、717、740 和 842nm,100m 飞行高度下的影像分辨率为 6.4cm / pixel,可使用全色通道提升多光谱通道的分辨率,提升后约为3.3cm / pixel,同时配备反射率校准板与下行辐射照度计,提升反演精度。


图2 MicaSense十通道多光谱系统RedEdge-P Dual(左)与大疆五通道多光谱系统精灵4多光谱
研究期间,伊比里泰水库的水质特征表现为叶绿素 a 浓度偏高,中位数为 55.1mg/L,标准差为 19.6mg/L;浊度为中等水平,中位数为 11.4NTU,标准差为 4.4NTU。
3. 结果
3.1 叶绿素a
光谱相关性分析表明,两款无人机平台对叶绿素 a 的检测均呈现出一致且可解释的规律。斯皮尔曼相关系数显示,叶绿素 a 对绿光和红边波段具有较强的光谱敏感性:RedEdge-P dual在 560nm(r=0.766)、531nm(r=0.735)和 717nm(r=0.730)波段与叶绿素 a 的相关性最高,与光学活性水体中叶绿素 a 的已知反射特征一致;大疆精灵 4 多光谱传感器表现出相似的光谱响应,在 560nm(r=0.613)和 730nm(r=0.632)波段相关性达到峰值。上述结果与已有研究结论一致,证实了红边波段在检测初级生产力较高、浮游植物生物量较大的内陆水体叶绿素 a 中的重要性。MicaSense的相关性更强,可能归因于其更窄的光谱波段,以及采用为该传感器优化的校准反射面板,提升了辐射精度和光谱灵敏度。
不同传感器和算法的模型性能存在显著差异:MicaSense传感器随机森林模型反演精度最高(R2=0.867,RMSE=6.72μg/L),其次为指数回归模型(R2=0.823)和决策树模型(R2=0.806),说明该模型在本研究条件下对叶绿素 a 的反演泛化能力有限;大疆精灵 4 多光谱传感器的决策树模型反演效果最佳(R2=0.825,RMSE=7.63μg/L),其次为随机森林模型(R2=0.779)。上述结果表明,集成算法和树基算法能够有效捕捉富营养化水体中叶绿素 a 与反射率之间的非线性关系,与已有研究结果相符。
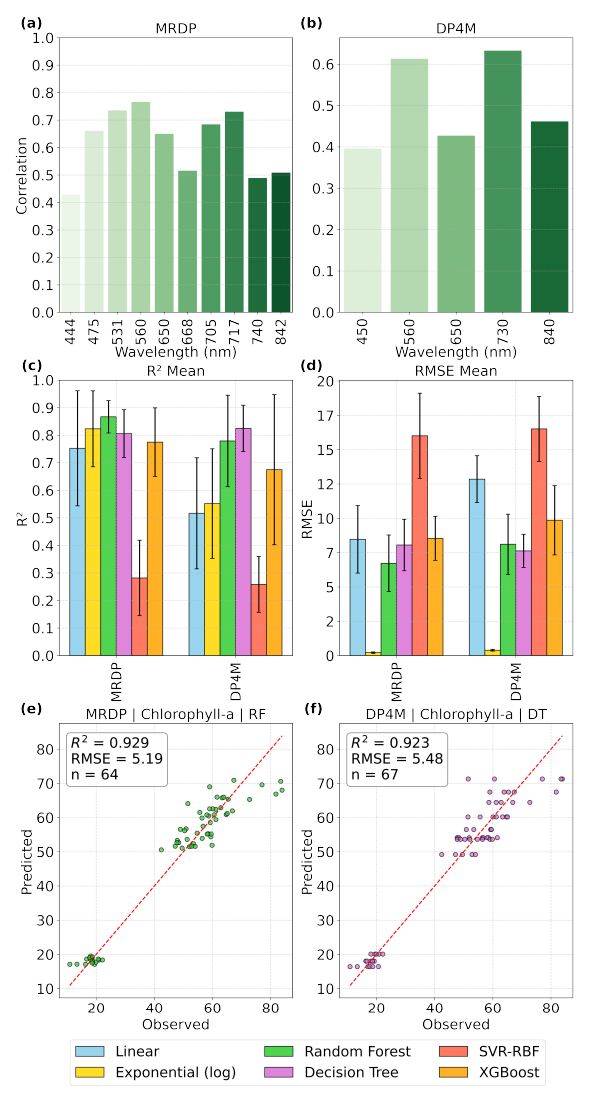
图3 两款多光谱相机、六种不同模型反演叶绿素a的结果
3.2 浊度
基于光谱反射率的浊度反演模式更为复杂,可预测性更低。MicaSense RedEdge-P Dual传感器在红边波段与浊度呈中等正相关,717nm 波段 r=0.541,705nm 波段 r=0.502,绿光波段的正相关性较弱;大疆精灵 4 多光谱传感器对浊度的光谱灵敏度整体更低,其与浊度相关性最高的波段同样为绿光(560nm,r=0.453)和红边(730nm,r=0.422)波段。这一趋势与已有研究一致,证实了红光波段对颗粒物后向散射的敏感性,且红边 - 绿光波段比是浊度反演的有效光谱指数。
研究还观测到负相关关系,尤其在蓝光、红光和近红外波段,这可能是由于光学复杂水体中叶绿素、有色溶解有机物和有机颗粒物的光谱效应相互叠加。仅利用呈正相关的波段训练模型时,预测精度均出现下降。
回归建模结果显示,不同传感器和算法的浊度反演性能存在明显差异:MicaSense RedEdge-P Dual传感器的线性回归模型反演效果最优,平均R2=0.712,RMSE=2.22,优于随机森林、决策树、径向基函数核支持向量回归等复杂模型,这一结果挑战了 “非线性方法在光学复杂内陆水体中始终表现更优” 的观点;而大疆精灵 4 多光谱传感器的所有模型反演效果均较差,其五波段配置对浊度的光谱灵敏度有限,表现最佳的径向基函数核支持向量回归模型R2仅为 0.285,RMSE=3.25,表明该传感器捕捉相关后向散射信号的能力受限。
已有研究也面临类似的浊度建模挑战,相关学者利用卫星数据反演巢湖浊度,随机森林和支持向量回归模型的R2分别为 0.67 和 0.60;另有学者利用MicaSense影像反演水库总悬浮物,随机森林、支持向量机和多元线性回归模型的R2分别为 0.78、0.75 和 0.72,与本研究中MicaSense传感器的反演效果相当或略优,且显著优于大疆精灵 4 多光谱传感器。
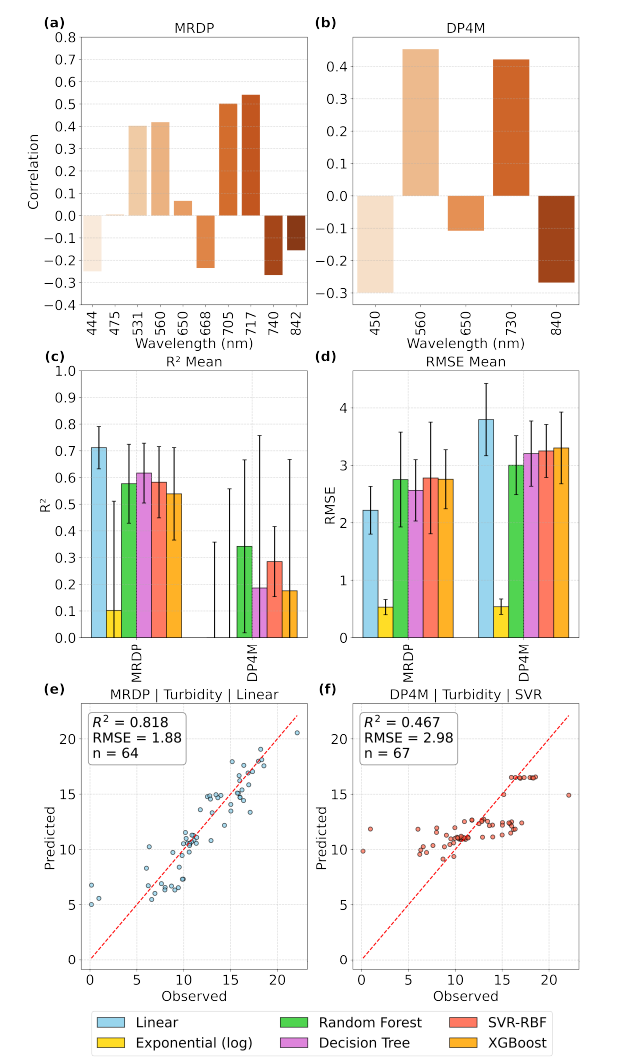
图4 两款多光谱相机、六种不同模型反演浊度的结果
上述研究结果表明,无论算法复杂度如何,传感器的性能局限、光谱效应的相互叠加以及浊度的扩散性特征,都会制约模型的反演性能。因此,在基于无人机的浊度反演中,除模型调优外,还需综合考虑传感器选择和水体特征。
4. 结论
本研究系统评估了无人机多光谱传感器结合统计模型和机器学习模型反演叶绿素 a、浊度等关键湖泊学指标的能力。结果表明,叶绿素 a 的反演预测效果较好,尤其是采用随机森林、决策树等集成模型时;MicaSense RedEdge-P Dual传感器的反演效果始终优于大疆精灵 4 多光谱传感器,光谱灵敏度更高,模型精度更好(R2分别为 0.867 和 0.825)。相比之下,浊度的反演精度更低、变异性更大,采用MicaSense数据的线性回归模型反演效果最佳(R2=0.712)。这种差异反映出两种水质参数的光谱表达能力不同,同时也表明在光学复杂水体中反演浊度存在固有挑战。
叶绿素 a 模型反演性能更优,原因在于该色素具有独特的光谱吸收和反射特征,尤其在绿光和红边波段,而MicaSense传感器的窄波段配置能够很好地捕捉这些特征;此外,利用反射面板进行辐射定标,大幅提升了地表反射率估算的可靠性。而浊度的光谱特征更宽泛、更扩散,常与水体中其他组分的光谱特征重叠,这种光学模糊性限制了多光谱传感器的分辨能力,尤其是波段更少、光谱特异性更低的大疆精灵 4 多光谱传感器。
从方法学角度来看,研究结果挑战了 “先进机器学习算法在遥感应用中始终优于简单模型” 的假设。集成算法和树基算法在叶绿素 a 反演中表现出极高的有效性,而在浊度反演中,采用MicaSense数据的线性回归模型效果优于复杂算法。这表明模型选择应具有参数特异性,并以数据的潜在光谱结构为依据;
产品推荐:


MicaSense RedEdge-P 系列多光谱相机
RedEdge P 系列搭载了五个窄带多光谱波段,每个波段分辨率达 1.6 MP,同时配备 5.1 MP 全色传感器,在 60 米高度可实现 2 厘米 / 像素的全色锐化分辨率,能清晰呈现作物细节,可两两组合或三个相机同时使用,获取10波段或者15波段数据,为后续的精准分析提供高质量图像及光谱基础。
该系列相机配备了 DLS2 和 CRP2 反射率面板,实现双重校准功能,确保在不同环境条件下,采集到的光谱数据始终保持高准确性和可靠性,为农业监测数据的科学性提供有力保障。同时,它兼容 DJI Skyport,可灵活适配多种无人机平台,还能在 Pix4D 和 Metashape 等主流软件中快速处理数据,极大降低了用户的使用门槛。
RedEdge P系列多光谱相机与RedEdge P Triple三相机多光谱系统


CRP2校准板与DLS2下行光照度计
经过DLS校准后可以消除阳光变化对数据的影响